Last year, as I started going through some more electronics projects, both artsy and not, I have lauded the ease that Circuit Python adds to building firmware for sometimes not too simple devices, particularly when combined with Adafruit’s Feather line up of boards with a fixed interchangable interface.
As I noted last month, though, it does feel like the situation in the last year didn’t improve, but rather become more messy and harder to use. Let me dig a bit more into what I think is the problem.
When I worked on my software defined remote control, I stopped at a checkpoint that was usable, but a bit clunky. In this setup, I was using an Feather nRF52840, because the M0 alternatives didn’t work out for me, but I was also restarting it before each command was sent, because of… issues.
Indeed, I found my use case turned out to be fairly niche. On the M0, the problem was that the carrier wave signal used to send the signal to the Bravia TV was too off in terms of duty cycle, which I assume was caused by the underpowered CPU running the timers. On the nRF52840 the problem was instead that, if I started both transmitters (for the Bravia and for the HDMI switch), one of them would be stuck high.
So what I was setting up the stream to do (which ended up not working due to muEditor acting up), was to test running the same code on three more feathers: the Feather RP2040, the FeatherS2, and the Feather M4. These are quite more powerful than the others, and I was hoping to find that they would work much better for my use case — but turned out to tell me something entirely different.
The first problem is that the Circuit Python interfaces are, as always, changing. And they change depending on the device. This hit me before with the Trinket M0 not implementing time the same way as the Feather M0, but in this case things changed quite a bit. Which meant that I couldn’t use the same code I was using on the nRF Feather on the two newest Feathers: it worked fine on the M4, it needed some tweaking for the FeatherS2, and couldn’t work at all on the RP2040.
Let’s start with the RP2040, the same way I wanted to start the stream. Turns out the RP2040 does not have PulseOut support at all, and this is one of the problems with the current API selection in Circuit Python: what you see before you try and look into the details, is that the module (pulseio) is present, but if you were to break down the features supported inside, you would find that sending a train of pulses with that module is not supported on the RP2040 (at least as of Circuit Python 6.2.0).
Now, the good part is that RP2040 supports Programmable I/O (PIO), which would make things a lot more interesting, because the pulsing out could be implemented in the “pioasm” language, most likely. But that requires also figuring out a lot more than I originally planned on doing: I thought I would at least reuse the standard pulsing out for the SIRC transmitter, as that does need a 40 kHz carrier, and the harder problem was to have a non-carried signal for the switch (which I feed directly into the output of the IR decoder).
So instead I dropped off to the next in the list, the FeatherS2, which I was interested in because it also supports WiFi natively, instead of through the AirLift. And that was the even more annoying discovery: the PulseOut implementation for the ESP-S2 port doesn’t allow using a PWM carrier object, it needs the parameters instead. This is not documented — if you do use the PulseOut interface as documented, you’re presented with an exception stating Port does not accept PWM carrier. Pass a pin, frequency and duty cycle instead. At the time of writing that particular string only has two hits on Google, both coming from a Stanford’s course material that included the Circuit Python translation files, so hopefully this will soon be the next hit on the topic.
Unfortunately there is also no documented way to detect whether you need to pass the PWM or the set of raw parameters, which I solved in pysirc by checking for the platform the code is running in:
_PULSEOUT_NO_CARRIER_PLATFORMS = {"Espressif ESP32-S2"}
if sys.platform in _PULSEOUT_NO_CARRIER_PLATFORMS:
pulseout = pulseio.PulseOut(
pin=pin, frequency=carrier_frequency, duty_cycle=duty_cycle
)
else:
pwm = pulseio.PWMOut(
pin, frequency=carrier_frequency, duty_cycle=duty_cycle
)
pulseout = pulseio.PulseOut(pwm)Since this is not documented, there is also no guarantee that this isn't going to be changing in the future, which is fairly annoying to me, but is not a big deal. But it also is not the only place where you end up having to rely on sys.platform for the FeatherS2. The other place is the pin names.
You see, one of the advantages of using Feathers for rapid prototyping, to me, was the ability to draw a PCB for a Feather footprint, and know that, as long as I checked that the pins were not being used by the combination of wings I needed (for instance the AirLift that adds WiFi support forces you to avoid a few pins, because it uses them to communicate), I would be able to take the same Circuit Python code and run it with any of the other feathers without worry.
But this is not the case for the FeatherS2: while obviously the ESP32 does not have the same set of GPIO as, say, the RP2040, I would have expected that the board pin definition would stay the same — not so. Indeed, while my code originally used board.D5 and board.D6 for the outputs, in the case of the FeatherS2 I had to use board.D20 and board.D21 to make use of the same PCB. And I had to do that by checking the sys.platform, because nothing else was telling.
The worst part of that? These pin definitions conflict between the FeatherS2 and the Feather M4. board.D20 is an on-board components, while board.D21 is SDA. On the FeatherS2, SDA is board.D10, and the whole right side of the pins is scrambled, which can cause significant conflicts and annoying debugging if using the same code in the same PCB with M4 versus S2.
{kind=link}
This is what made me really worried about the direction of Circuit Python — when I looked at it last year it was a very good HAL (Hardware Abstraction Layer) that allowed you to write code that can work in multiple boards. And while some of the features obviously wouldn't be available (such as good floating-point on the M0), those that would be were following the same API. Nowadays? Every port appears to have a slight different API, and different devices with the same form factor need different code. Which is kind of understandable, as the amount of supported boards increased significantly, but it still goes against the way I was hoping it would go.
Now, if the FeatherS2 worked for my needs, that would have been good enough. After all, I adapted pysirc to work with the modified API, so I thought I would be ready. But then something else caught my attention: as I said above, the signal sent to the switch doesn't need to be modulated on top of a carrier wave. Indeed, if I did do that, the switch wouldn't recognize the commands. So for that I would like a 100% duty cycle, but the FeatherS2 doesn't have that as an option. Nor does it seem to be able to set a 99% cycle either. So I found myself looking at a very dirty signal compared to what I wanted.
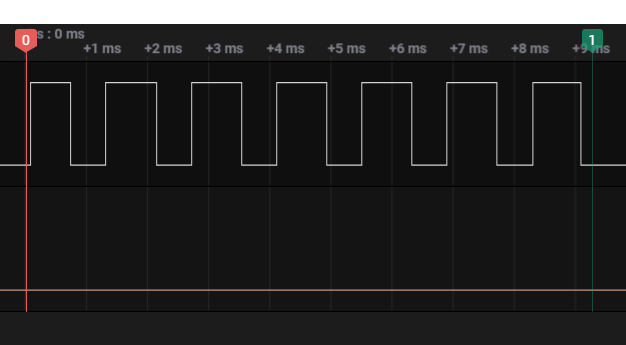
Basically, the FeatherS2 is not fit for purpose when it comes to the problem I needed solving. So at the end of the day, I ended up just going back to what is in my opinion the best implementation for the form factor: the Feather M4. This worked fine for sending the two signals without needing to restart the Feather (unlike on the nRF), which shortened the time needed to send messages to TV and switch significantly (yay!) even though it still has a bit of a "dirty" pulse signal when running a 99% duty cycle at 10 Hz:

But I'm still upset, because I feel Circuit Python is becoming less reliable on the "Write Once, Run Anywhere" suggestion that it was giving last year: you really need to make the code tailored for a particular implementation, instead of being able to rely on the already existing libraries.
Update 2021-05-26
Scott Shawcroft from Circuit Python got in touch as a follow up from this post, and it looks like some of the issues I reported here were either already on the radar (PulseOut for rp2040), re-opened following this post (PulseOut for ESP32-S2), or have now been addressed (Feather pin names). A huge thanks to Scott and the Circuit Python team all!
You can also see here that Scott is well aware of the importance of this all to fit together nicely — so hopefully the FeatherS2 is going to be a one-off special case!